奧譜天成應(yīng)用案例|基于多光譜影像的小麥葉綠素含量及產(chǎn)量定量反演研究
一.前言
小麥作為世界三大糧食作物之一,是全球40%人口的主食來源。小麥作為我國(guó)主要的糧食作物之一,種植范圍十分廣泛。專用品種小麥的生長(zhǎng)狀況對(duì)我國(guó)國(guó)民經(jīng)濟(jì)發(fā)展方面有著重要的作用,因此對(duì)小麥長(zhǎng)勢(shì)進(jìn)行高效、無損地監(jiān)測(cè),對(duì)小麥產(chǎn)量進(jìn)行及時(shí)、準(zhǔn)確地預(yù)測(cè)變得尤為重要。
二.技術(shù)思路與主要內(nèi)容
奧譜天成利用全國(guó)產(chǎn)化的多光譜成像儀,以十個(gè)不同品種的小麥為研究對(duì)象,一方面利用多光譜相機(jī)采集的小麥揚(yáng)花早、晚期的影像數(shù)據(jù),利用影像計(jì)算的植被指數(shù)構(gòu)建不同相機(jī)下的小麥揚(yáng)花早期和晚期的葉綠素反演模型;另一方面利用無人機(jī)多光譜獲取小麥灌漿中期高分辨率影像,基于顏色特征和植被指數(shù)構(gòu)建小麥灌漿中期的葉綠素和小麥產(chǎn)量反演模型。

圖1 總體技術(shù)路線
需實(shí)現(xiàn)內(nèi)容:
1)多光譜影像預(yù)處理:利用多光譜采集小麥田間可見光和多光譜影像時(shí),為保證后續(xù)圖像處理的統(tǒng)一性,需要人為提前設(shè)置好曝光時(shí)間、光圈等參數(shù)。采集影像后為方便后續(xù)實(shí)驗(yàn)定量化的使用,對(duì)獲取影像數(shù)據(jù)需要進(jìn)行輻射校正、影響拼接、正射校正、幾何校正和影像裁剪等預(yù)處理操作。
2)基于可見光和多光譜影像的小麥葉綠素含量反演:以10個(gè)不同品種小麥為研究對(duì)象,利用可見光和多光譜相機(jī)獲取小麥揚(yáng)花早、晚期的影像數(shù)據(jù)。通過實(shí)測(cè)的小麥葉綠素含量與兩種影像計(jì)算多種植被指數(shù)的相關(guān)性分析,選取反演小麥葉綠素含量**的植被指數(shù)。最后基于選取的植被指數(shù)建立了不同相機(jī)下小麥揚(yáng)花期和晚期的葉綠素含量反演模型。
3)基于高分辨率無人機(jī)影像的小麥葉綠素及產(chǎn)量反演:利用無人機(jī)搭載的多光譜相機(jī)獲取小麥灌漿中期的影像數(shù)據(jù)。引入偏最小二乘算法,篩選出與實(shí)測(cè)參數(shù)相關(guān)性最高的多個(gè)特征作為自變量,分別構(gòu)建小麥灌漿中期葉綠素和小麥產(chǎn)量反演模型。
4)無人搭載的多光譜相機(jī)飛行一個(gè)月一次,基于長(zhǎng)時(shí)間序列的監(jiān)測(cè)影像數(shù)據(jù),從而對(duì)精準(zhǔn)監(jiān)控提供參考依據(jù)。
技術(shù)要點(diǎn)
多光譜影像預(yù)處理
由于受到傳感器自身特性、天氣等多種因素的限制,在數(shù)據(jù)獲取過程中難免會(huì)產(chǎn)生誤差,這些誤差不僅會(huì)降低影像數(shù)據(jù)的質(zhì)量,也會(huì)影響后續(xù)影響分析的精度。因此,在進(jìn)行多光譜遙感影像分析之前,需要對(duì)原始影像進(jìn)行預(yù)處理操作。影像數(shù)據(jù)預(yù)處理流程圖如圖2所示。
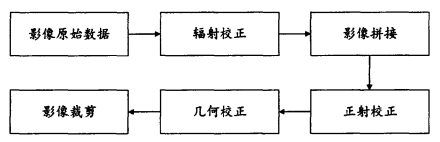
圖2 影像數(shù)據(jù)預(yù)處理流程圖
(1)輻射校正:無人機(jī)在飛行過程中,因光線及天氣情況的不同,獲取的影像在光譜維上會(huì)產(chǎn)生畸變。為保證后續(xù)影像拼接任務(wù)順利完成, 需要對(duì)數(shù)據(jù)進(jìn)行輻射校正。本文中可見光影像輻射校正采用的是偽 標(biāo)準(zhǔn)地物法——白板法,通過地面目標(biāo)測(cè)得的反射率將影像的值轉(zhuǎn)換為圖像反射率,夠較真實(shí)的反映地表反射率,從而達(dá)到試驗(yàn)的要求和目的。多光譜影像輻射校正是使用奧譜天成多光譜成像儀自帶的數(shù)據(jù)處理軟件來完成的。
(2)正射校正:無人機(jī)在采集影像數(shù)據(jù)時(shí),受自然風(fēng)的影響機(jī)身不可避免地會(huì)出現(xiàn)抖動(dòng)、傾斜等情況、同時(shí)相機(jī)鏡頭也會(huì)因飛行姿態(tài)變化而引起投影變形,因此有必要對(duì)影像進(jìn)行正射校正。正射校正是基于糾正變換函數(shù)將原始影像的像元逐個(gè)變換到校正影像的坐標(biāo)系中。其處理流程如圖3所示。
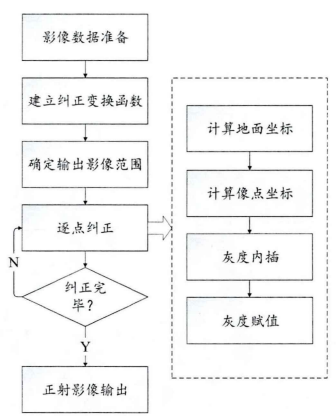
圖3 無人機(jī)影像正射校正處理流程
(3)幾何校正:由于無人機(jī)自帶的定位系統(tǒng)精度有限,加之飛行過程中容易受到空中氣流、風(fēng)速和風(fēng)向等外界因素的影響,導(dǎo)致獲取影像的地理坐標(biāo)與實(shí)際坐標(biāo)存在誤差,因此需要通過地面控制點(diǎn)高精度定位系統(tǒng)的坐標(biāo)數(shù)據(jù)對(duì)航拍影響做幾何校正。
偏最小二乘回歸
在實(shí)際問題中,經(jīng)常遇到需要研究?jī)山M多重相關(guān)變量間的相互依賴關(guān)系,并研究用一組變量(自變量或預(yù)測(cè)變量)去預(yù)測(cè)另一組變量(因變量或響應(yīng)變量),除了最小二乘準(zhǔn)則下的經(jīng)典多元線性回歸分析(MLR),提取自變量組分成分的主成分回歸分析(PCR)等方法外,還有近年來發(fā)展起來的偏最小二乘(PLS)回歸方法。
偏最小二乘回歸提供一種多對(duì)多線性回歸建模的方法,特別當(dāng)兩組變量的個(gè)數(shù)很多,且都存在多重相關(guān)性,而觀測(cè)數(shù)據(jù)的數(shù)量(樣本量)又較少時(shí),用偏最小二乘回歸建立的模型具有傳統(tǒng)的經(jīng)典回歸分析等方法所沒有的優(yōu)點(diǎn)。偏最小二乘回歸分析在建模過程中集中了主成分分析,典型相關(guān)分析和線性回歸分析方法的特點(diǎn),因此在分析結(jié)果中,除了可以提供一個(gè)更為合理的回歸模型外,還可以 同時(shí)完成一些類似于主成分分析和典型相關(guān)分析的研究?jī)?nèi)容,提供更豐富、深入的一些信息。
植被各類指數(shù)計(jì)算公式
表1 植被指數(shù)計(jì)算公式
|
英文簡(jiǎn)稱
|
植被指數(shù)名稱
|
計(jì)算公式
|
|
GI
|
綠度指數(shù)
|
R544/R677
|
|
SIPI
|
結(jié)構(gòu)不敏感植被指數(shù)
|
(R800-R445)/(R800-R680)
|
|
NPCI
|
歸一化總色素葉綠素指數(shù)
|
(R680-R430)/(R680+R430)
|
|
MSR
|
修正簡(jiǎn)單植被指數(shù)
|
(R800/R670- 1)/(R800/R670+l)^1/2
|
|
NRI
|
氮反射率指數(shù)
|
(R570-R670)/(R570+R670)
|
|
PRI
|
光化學(xué)反射指數(shù)
|
(R570-R531)/(R570+R531)
|
|
TCARI
|
轉(zhuǎn)換型葉綠素指數(shù)
|
3*[(R700-R670)-0.2*(R700-R550)*(R700/R670)]
|
|
PSRI
|
植被衰減指數(shù)
|
(R800-R445)/(R800-R680)
|
|
PHRI
|
生理反射指數(shù)
|
(R550-R531)/(R550+R531)
|
|
ARI
|
花青素反射指數(shù)
|
(R550)^(- 1)-(R700)^(-1)
|
|
TVI
|
三角植被指數(shù)
|
0.5*[120*(R750-R550)-200*(R670-R550)]
|
|
RVSI
|
紅邊植被脅迫指數(shù)
|
[(R712+R752)/2]-R732
|
|
MCARI
|
調(diào)節(jié)型葉綠素吸收比率指數(shù)
|
[(R701-R671)-0.2*(R701-R549)]/(R701/R671)
|
|
AR VI
|
抗大氣植被指數(shù)
|
R800-(2*R700-R436)]/[R800+2*R700-R436)
|
|
DVI
|
差值植被指數(shù)
|
R800-R700
|
|
EVI
|
增強(qiáng)型植被指數(shù)
|
2*(R800-R700)/(R800+6*R700-7.5*R436+1)
|
|
GNDVI
|
綠度歸一化植被指數(shù)
|
(R546-R700)/(R546+R700)
|
|
LMI
|
葉片濕度指數(shù)
|
R1650/R830
|
|
OSAVI
|
**化土壤調(diào)節(jié)植被指數(shù)
|
[(R800-R700)/(R800+R700+0.16)]*(1+0.16)
|
|
NDVI
|
歸一化差值植被指數(shù)
|
(R800-R700)/(R800+R700)
|
|
RVI
|
比值植被指數(shù)
|
R800/R700
|
|
SAVI
|
土壤調(diào)節(jié)植被指數(shù)
|
1.5*(R800-R700)/(R800+R700+0.5)
|
|
SLAVI
|
特殊葉面積植被指數(shù)
|
R800/(R700+R800)
|
|
VARI
|
可見光抗大氣指數(shù)
|
(R546-R700)/(R546+R700-R436)
|
|
YI
|
黃度指數(shù)
|
(R580-2*R630+R680)/2500
|
|
WBI
|
水波段指數(shù)
|
R950/R900
|
四.方案實(shí)施
4.1多光譜無人機(jī)飛行服務(wù)
多光譜成像是指同時(shí)能夠獲取多個(gè)光譜波段(通常大于等于3個(gè)),并在可見光的基礎(chǔ)上向紅外光和紫外光兩個(gè)方向擴(kuò)展的光譜探測(cè)技術(shù)。常見實(shí)現(xiàn)方法是通過各種濾光片或分光器與數(shù)字圖像傳感器的組合,使其在同一時(shí)刻分別接收同一目標(biāo)在不同窄光譜波段范圍內(nèi)輻射或反射的光信號(hào),得到目標(biāo)在幾張不同光譜帶的照片。多光譜圖像是由成像光譜儀獲取的,多光譜成像儀是一種能夠同時(shí)獲取光譜特征和空間圖像信息的設(shè)備,是光電成像系統(tǒng)發(fā)展的重要方向。多光譜成像系統(tǒng)可提供具有3至20個(gè)非連續(xù)波段的圖像,并已在農(nóng)業(yè)和食品領(lǐng)域得到廣泛應(yīng)用。從成像原理上來講,多光譜成像技術(shù)就是把入射的全波段或?qū)挷ǘ蔚墓庑盘?hào)分成若干個(gè)窄波段的光束,然后把他們分別成像在相應(yīng)的探測(cè)器上,從而獲得不同光譜波段的圖像。因此,利用多光譜特性可以將植被與非植被分離,并且與無人機(jī)進(jìn)行結(jié)合,可以實(shí)現(xiàn)植被健康狀態(tài)分析。
無人機(jī)多光譜具有以下特點(diǎn):
采集速度快。多光譜因其采集的波段相對(duì)較少,故采集速度相對(duì)較快;
復(fù)雜性低。由于波段數(shù)量的限制,多光譜復(fù)雜性較低,更容易理解和應(yīng)用,處理工作相對(duì)較少。
數(shù)據(jù)量豐富。隨著波段數(shù)的增加,數(shù)據(jù)量呈指數(shù)增加。可提供空間域信息和光譜域信息,即“圖譜合一”,并且由成像光譜儀得到的光譜曲線可以與地面實(shí)測(cè)的同類地物光譜曲線相類比。
在規(guī)劃的研究區(qū)域,根據(jù)需求采集高光譜影像。具體步驟如下:
無人機(jī)端設(shè)置:組裝無人機(jī)高光譜設(shè)備,設(shè)置航高、航速,根據(jù)相機(jī)參數(shù)和影像重疊度需求設(shè)置影像航線間距;
相機(jī)端設(shè)置:根據(jù)航高航速設(shè)置相機(jī)幀率,根據(jù)白板測(cè)量值設(shè)置積分時(shí)間(曝光時(shí)間);
標(biāo)準(zhǔn)反射率白板:在航線區(qū)域擺放標(biāo)準(zhǔn)反射率白板,采集影像時(shí)需拍攝到白板。

圖8 無人機(jī)高光譜數(shù)據(jù)采集示意圖
4.2無人機(jī)高光譜圖像處理
無人機(jī)高光譜影像數(shù)據(jù)采集后,需要進(jìn)行以下預(yù)處理工作:
波長(zhǎng)定標(biāo):采集的原始影像沒有波長(zhǎng)信息,需要添加波長(zhǎng)定標(biāo)文件;
影像裁剪:高光譜采用推掃式成像,需要對(duì)采集的測(cè)區(qū)影像進(jìn)行裁剪;
配準(zhǔn)拼接:對(duì)裁剪后的測(cè)區(qū)影像進(jìn)行地理配準(zhǔn)或相對(duì)配準(zhǔn),之后對(duì)配準(zhǔn)后的影像拼接成完整影像;
輻射校正:原始影像中的值代表反射強(qiáng)度,需要利用白板反射值和標(biāo)準(zhǔn)反射率進(jìn)行校正,計(jì)算整個(gè)影像的反射率。
混合光譜分解:無人機(jī)采集的光譜數(shù)據(jù)受空間分辨率影像,導(dǎo)致一個(gè)像元中可能由不同地物或者植被混合平均而成,為提高精度,需要對(duì)影像進(jìn)行混合光譜分解操作;
(6)光譜濾波(平滑):原始影像中的光譜信息存在一定的噪聲,在應(yīng)用之前需要進(jìn)行光譜濾波。
光譜圖像處理軟件界面:
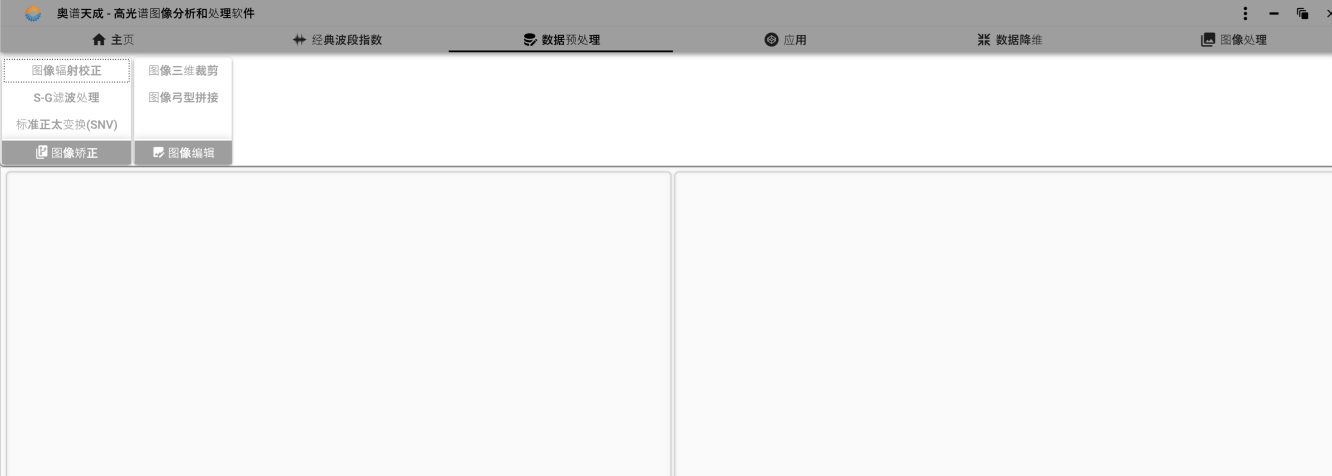
圖9 無人機(jī)高光譜圖像處理軟件界面示意圖
4.3地物樣本數(shù)據(jù)采集
奧譜天成利用全國(guó)產(chǎn)化的高光譜成像儀和地物光譜儀在實(shí)地開展現(xiàn)場(chǎng)調(diào)查,目的是為無人機(jī)遙感圖像的分類提供現(xiàn)場(chǎng)分類模型真實(shí)訓(xùn)練樣本和分類結(jié)果的檢驗(yàn)樣本。現(xiàn)場(chǎng)調(diào)查的主要內(nèi)容是測(cè)量感染穗頸瘟的水稻光譜數(shù)據(jù),將地物光譜儀采集到的所有穗頸瘟水稻光譜數(shù)據(jù)進(jìn)行不同感染程度的等級(jí)劃分,作為無人機(jī)高光譜影像數(shù)據(jù)處理的標(biāo)準(zhǔn)訓(xùn)練樣本數(shù)據(jù)集。

4.4結(jié)果分析

圖12 植被含水量反演結(jié)果
4.4.1估算結(jié)果可靠性
模型精度檢驗(yàn)可以根據(jù)均方跟誤差(Root Mean Square Error, RMSE)和相關(guān)系數(shù)(r)兩個(gè)指標(biāo)來進(jìn)行分析。
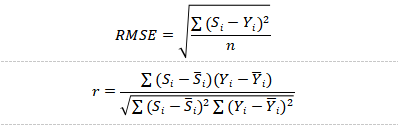
式中,n為樣本數(shù),為樣本i的實(shí)驗(yàn)室測(cè)定值,為所有驗(yàn)證樣本的平均值;為利用模型預(yù)測(cè)值,為所有對(duì)應(yīng)驗(yàn)證樣本的預(yù)測(cè)值的平均值。RMSE值越小,R相關(guān)系數(shù)值越大,說明模型精度越高。
4.4.2估算精度影響因素
影響反演結(jié)果精度的因素主要包含以下幾個(gè)方面:
1. 光譜數(shù)據(jù):受外業(yè)數(shù)據(jù)采集時(shí)的環(huán)境影響和不確定性的人為操作影響,導(dǎo)致拍攝的高光譜影像質(zhì)量存在一定的差異。但該因素不是主要因素。
2. 實(shí)測(cè)數(shù)據(jù):實(shí)測(cè)數(shù)據(jù)包含葉片的光譜數(shù)據(jù)和參數(shù)定量測(cè)量數(shù)據(jù)。受儀器設(shè)備和人為操作因素等的影響,這兩種實(shí)測(cè)數(shù)據(jù)可能會(huì)存在一定誤差,但對(duì)反演結(jié)果的影響較小。重要的是,在測(cè)量這兩種實(shí)測(cè)值時(shí)的時(shí)間差是影像反演模型的主要因素之一。盡量避免葉片采摘后長(zhǎng)時(shí)間再測(cè)量,并保證光譜測(cè)量和參數(shù)定量測(cè)量同時(shí)進(jìn)行。
3. 反演模型:反演模型的構(gòu)建是影響反演精度的主要因素。受特征光譜的選擇、變量的形式以及反演模型的形式等的影響,導(dǎo)致反演結(jié)果存在很大的不確定性。

